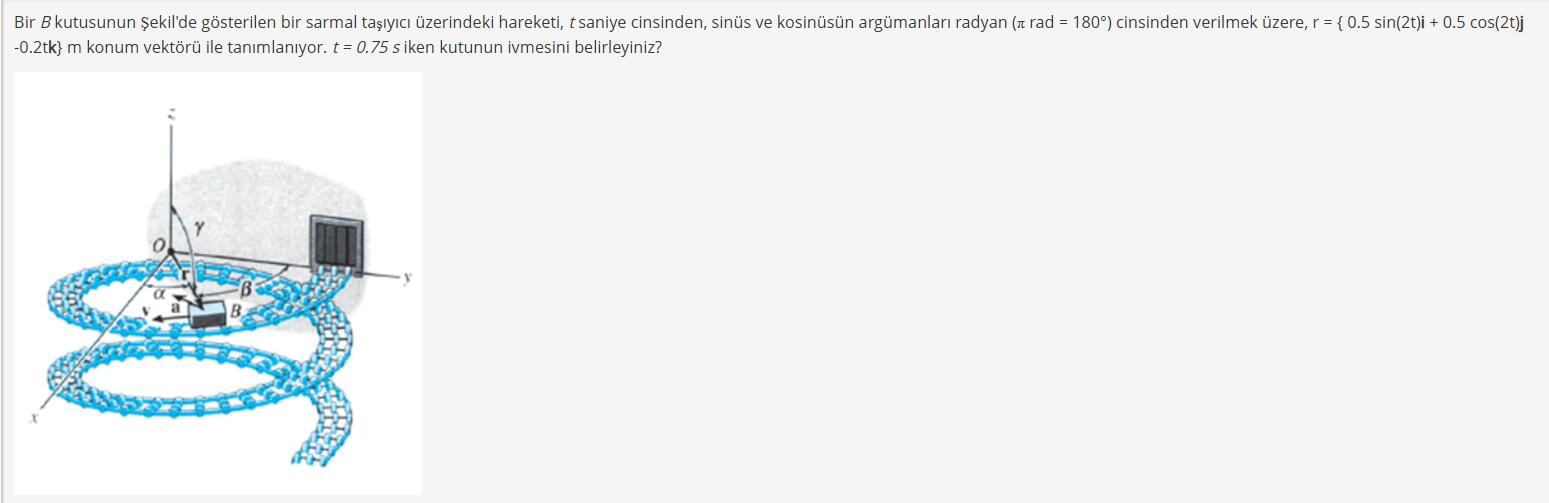
Bir ( B ) kutusunun Şekil’de gösterilen bir sarmal taşıyıcı üzerindeki hareketi, ( t ) saniye cinsinden, sinüs ve kosinüsün argümanları radyan ((\pi , \text{rad} = 180^\circ) cinsinden verilmek üzere, ( r = { 0.5 \sin(2t) \mathbf{i} + 0.5 \cos(2t) \mathbf{j} -0.2t\mathbf{k} }) konum vektörü ile tanımlanıyor. ( t = 0.75 , \text{s} ) iken kutunun ivmesini belirleyiniz?
Bu problemi çözmek için adım adım konum vektöründen hız ve ivme vektörlerini türetelim.
1. Konum Vektörü
Konum vektörümüz:
[
\mathbf{r} = 0.5 \sin(2t) \mathbf{i} + 0.5 \cos(2t) \mathbf{j} - 0.2t \mathbf{k}
]
2. Hız Vektörü
Hız vektörünü bulmak için konum vektörünün zaman türevini alalım:
[
\mathbf{v} = \frac{d}{dt}\mathbf{r} = \frac{d}{dt}(0.5 \sin(2t) \mathbf{i} + 0.5 \cos(2t) \mathbf{j} - 0.2t \mathbf{k})
]
Bu türevi alırken:
- (\sin(2t))'nin türevi (2 \cos(2t))
- (\cos(2t))'nin türevi (-2 \sin(2t))
- (-0.2t)'nin türevi ise (-0.2)
Böylece hız vektörü:
[
\mathbf{v} = 0.5 \cdot 2 \cos(2t) \mathbf{i} - 0.5 \cdot 2 \sin(2t) \mathbf{j} - 0.2 \mathbf{k}
]
[
\mathbf{v} = \cos(2t) \mathbf{i} - \sin(2t) \mathbf{j} - 0.2 \mathbf{k}
]
3. İvme Vektörü
İvme vektörünü bulmak için hız vektörünün zaman türevini alalım:
[
\mathbf{a} = \frac{d}{dt}\mathbf{v} = \frac{d}{dt}(\cos(2t) \mathbf{i} - \sin(2t) \mathbf{j} - 0.2 \mathbf{k})
]
Bu türevi alırken:
- (\cos(2t))'nin türevi (-2 \sin(2t))
- (\sin(2t))'nin türevi (2 \cos(2t))
Böylece ivme vektörü:
[
\mathbf{a} = -2 \cdot \sin(2t) \mathbf{i} - 2 \cdot \cos(2t) \mathbf{j}
]
[
\mathbf{a} = -2 \sin(2t) \mathbf{i} - 2 \cos(2t) \mathbf{j}
]
4. İvmenin Zaman t = 0.75 s’deki Değeri
Şimdi ( t = 0.75 , \text{s} ) için (\mathbf{a})’yı hesaplayalım:
[
\mathbf{a} = -2 \sin(1.5) \mathbf{i} - 2 \cos(1.5) \mathbf{j}
]
- (\sin(1.5) \approx 0.997)
- (\cos(1.5) \approx 0.0707)
Bu değerleri yerine koyarsak:
[
\mathbf{a} = -2 \times 0.997 \mathbf{i} - 2 \times 0.0707 \mathbf{j}
]
[
\mathbf{a} \approx -1.994 \mathbf{i} - 0.1414 \mathbf{j}
]
Böylece, kutunun ivmesi ( t = 0.75 , \text{s} ) iken yaklaşık olarak (-1.994 \mathbf{i} - 0.1414 \mathbf{j}) olacaktır.