|2 DİKKAT
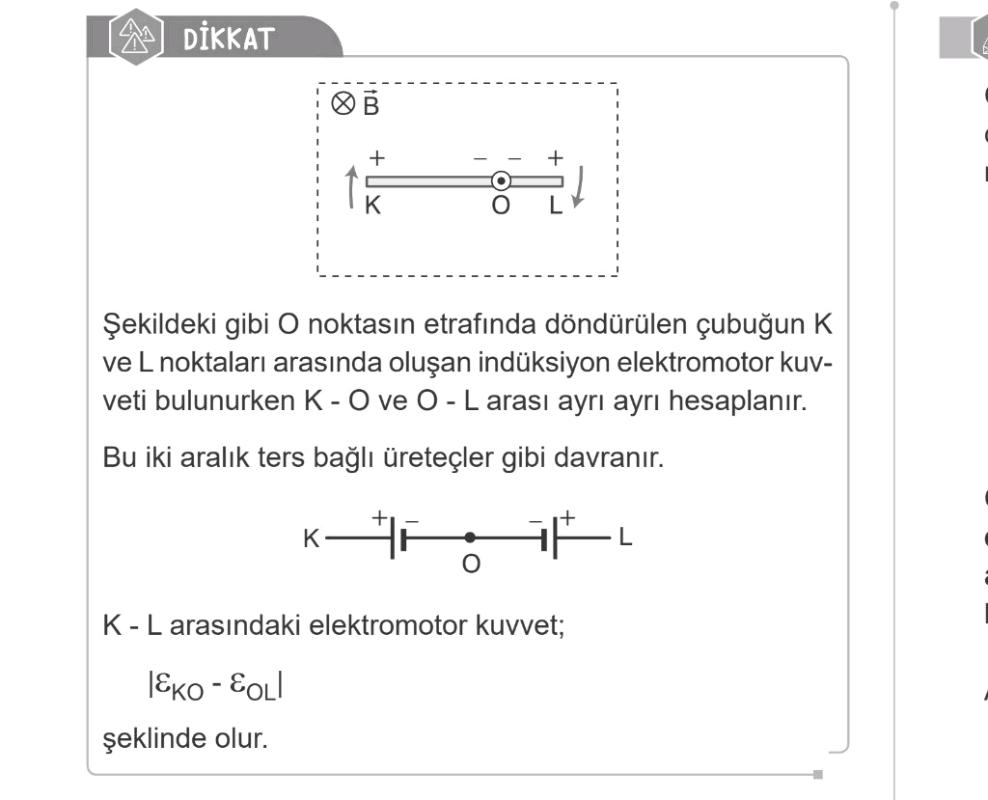
Şekildeki gibi noktasın etrafıinda döndürülen çubuğunK
ve L noktaları arasında oluşan indüksiyon elektromotor kuv-
veti bulunurken K- O ve O - L arası ayrı ayrı hesaplanır.
Bu iki aralık ters bağlı üreteçler gibi davranır.
K-Larasındaki elektromotor kuvvet;
|EKo -&oL
şeklinde olur.
Dönen Çubuğun K ve L Noktaları Arasında Oluşan İndüksiyon Elektromotor Kuvveti (EMK)
![]() [FORMÜL:] Bir ucu etrafında \omega açısal hızıyla döndürülen L uzunluğundaki bir çubuğun uçları arasında oluşan indüksiyon EMK’sı şu formülle hesaplanır:
[FORMÜL:] Bir ucu etrafında \omega açısal hızıyla döndürülen L uzunluğundaki bir çubuğun uçları arasında oluşan indüksiyon EMK’sı şu formülle hesaplanır:
\varepsilon = \frac{1}{2} \cdot B \cdot \omega \cdot L^2
![]() [ÇÖZÜM ADIMLARI:]
[ÇÖZÜM ADIMLARI:]
Adım 1 — O-K Aralığının İncelenmesi
Manyetik alan içerisinde O noktası etrafında dönen çubuğun OK kısmı için bir potansiyel fark oluşur. Sağ el kuralına göre (başparmak hız, dört parmak manyetik alan, avuç içi artı yüklerin yönü), K ucu pozitif (+), O noktası ise negatif (-) yüklenir. Bu aralıktaki EMK değerine \varepsilon_{KO} diyelim.
Adım 2 — O-L Aralığının İncelenmesi
Çubuk bir bütün olarak döndüğü için OL kısmı, OK kısmına göre zıt yönde hareket eder. Yine sağ el kuralı uygulandığında, L ucunun pozitif (+), O noktasının ise negatif (-) yüklendiği görülür. Bu aralıktaki EMK değerine \varepsilon_{OL} diyelim.
Adım 3 — Ters Bağlı Üreteç Mantığı
Şekilde görüldüğü gibi, her iki parça için de O noktası negatif (-) kutup görevi görür. Bu durum, iki üretecin eksi kutuplarının birbirine bağlanması (ters bağlama) gibidir. Bu nedenle K ve L noktaları arasındaki toplam potansiyel fark, bu iki değerin farkı alınarak bulunur.
━━━━━━━━━━━━━━━━━━━━━━━━━━━
![]() [CEVAP:] K ve L noktaları arasındaki indüksiyon elektromotor kuvveti:
[CEVAP:] K ve L noktaları arasındaki indüksiyon elektromotor kuvveti:
\varepsilon_{KL} = |\varepsilon_{KO} - \varepsilon_{OL}|
━━━━━━━━━━━━━━━━━━━━━━━━━━━
![]() [TEMEL KAVRAMLAR:]
[TEMEL KAVRAMLAR:]
1. Sağ El Kuralı
- [Tanım:] Manyetik alanda hareket eden yüklerin hangi kutupta toplanacağını belirlemek için kullanılır.
- [Bu problemde:] Çubuğun dönme yönüne göre uç noktaların hangi işarete sahip olduğunu belirlememizi sağlar.
2. Açısal Hız (\omega)
- [Tanım:] Birim zamandaki tarama açısıdır.
- [Bu problemde:] Çubuğun her noktası aynı \omega ile döner ancak çizgisel hızları merkeze uzaklıklarına göre değişir. Bu yüzden formülde \frac{1}{2} B \omega L^2 kullanılır.
![]() [SIK YAPILAN HATALAR:]
[SIK YAPILAN HATALAR:]
![]() EMK Değerlerini Toplamak
EMK Değerlerini Toplamak
- [Yanlış:] \varepsilon_{KL} = \varepsilon_{KO} + \varepsilon_{OL}
- [Doğru:] \varepsilon_{KL} = |\varepsilon_{KO} - \varepsilon_{OL}|
- [Neden yanlış:] Çubuk aynı yönde öteleme yapsaydı toplanabilirdi, ancak bir nokta etrafında döndüğü için uçlar aynı cins yükle (burada her ikisi de +) yüklenir ve ters bağlı üreteç etkisi yaratır.
| Parametre | O-K Bölgesi | O-L Bölgesi |
|---|---|---|
| Dönme Merkezi | O Noktası | O Noktası |
| Kutup İşareti | K(+) , O(-) | L(+) , O(-) |
| Bağlantı Türü | Seri-Ters | Seri-Ters |
Bu konuda çubuğun boyu farklı verilseydi (OK = 2L, OL = L gibi) hesaplamanın nasıl değişeceğini göstermemi ister misin?